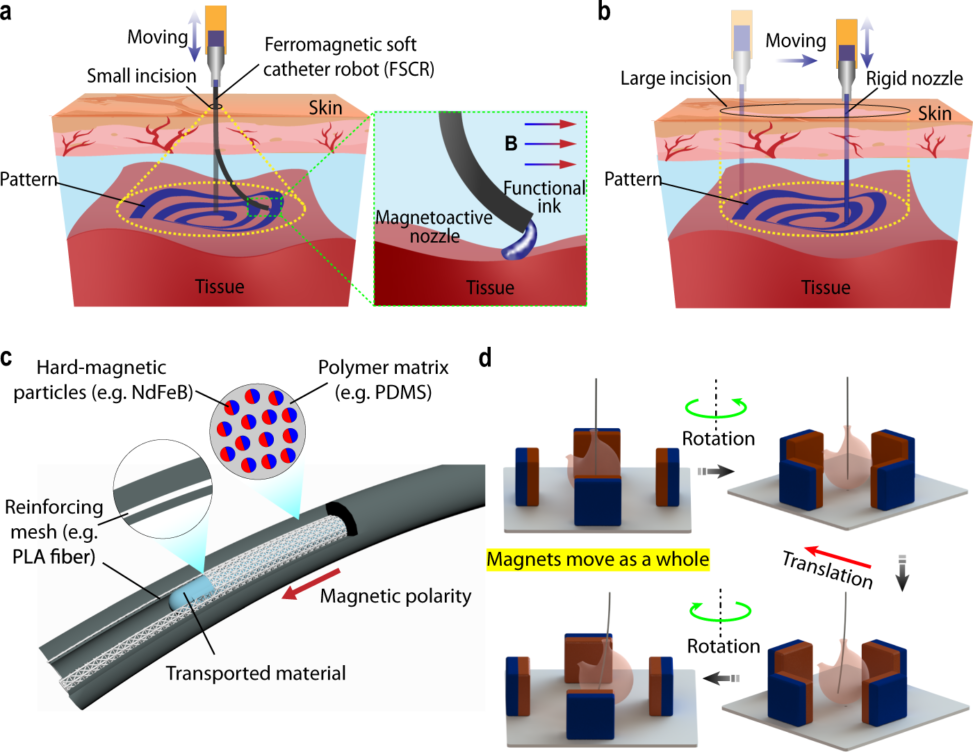
生体内での3Dプリント技術は、人工的な生体組織や医療機器をターゲットとする生体内の場所で直接つくることを可能とする手法である。しかし、現存の手法では皮膚の近くのみでしか使えなかったり、内臓に用いるには開腹手術が必要であったりと制限がある。
そこで、負担を小さくして3Dプリントするための方法として、磁力を使ったカテーテルロボットを開発したのが本研究である。カテーテルを差し込み、さらにその向きを外部から磁石で制御することで、開腹せずに精度の高い3Dプリントを可能にした。
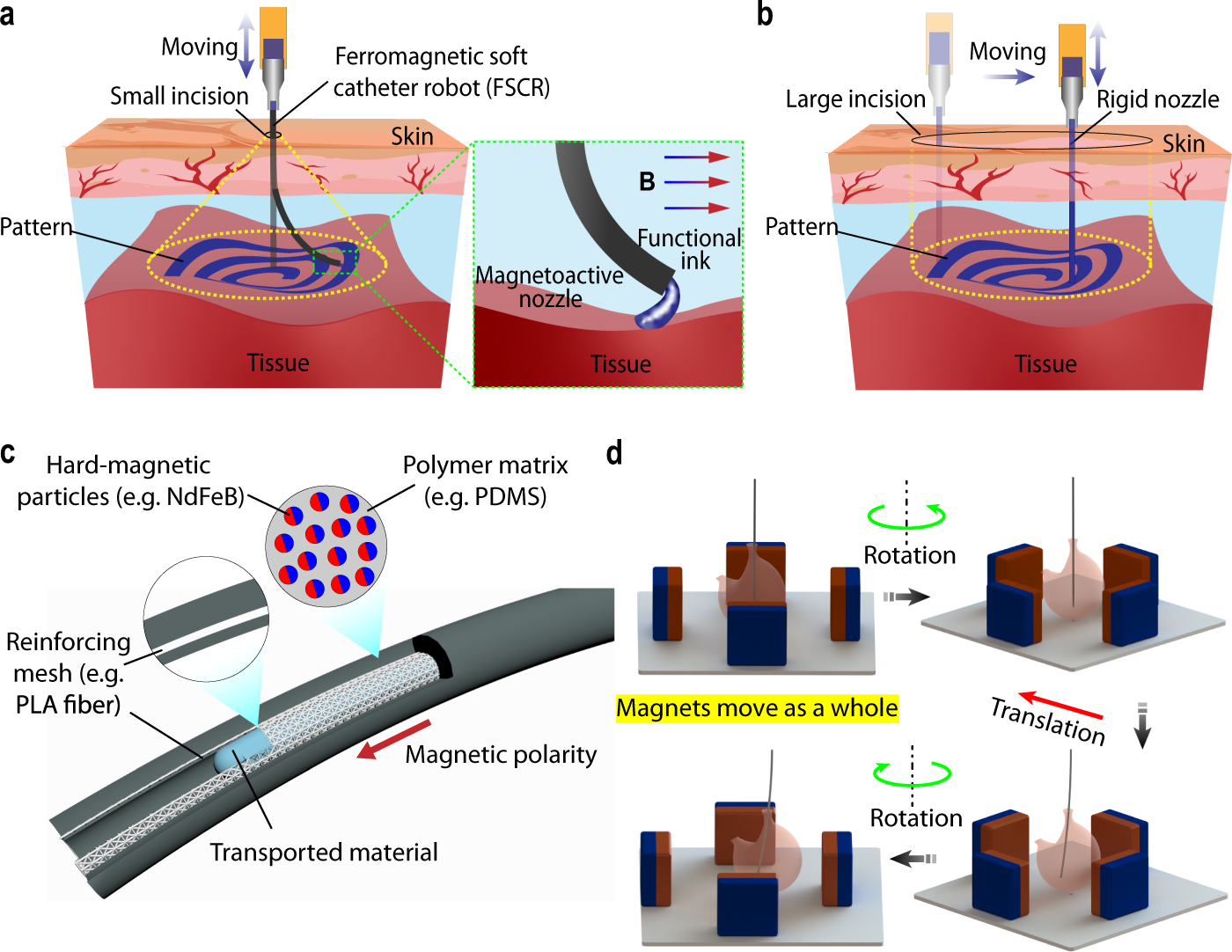
実際に様々なパターンが出力できることと、ラットの体内でも出力できることを確認している、

Zhou, C., Yang, Y., Wang, J. et al. Ferromagnetic soft catheter robots for minimally invasive bioprinting. Nat Commun 12, 5072 (2021). https://doi.org/10.1038/s41467-021-25386-w